以树莓派4B为例子,3B/3B+过程略有不同,设置基本无异:
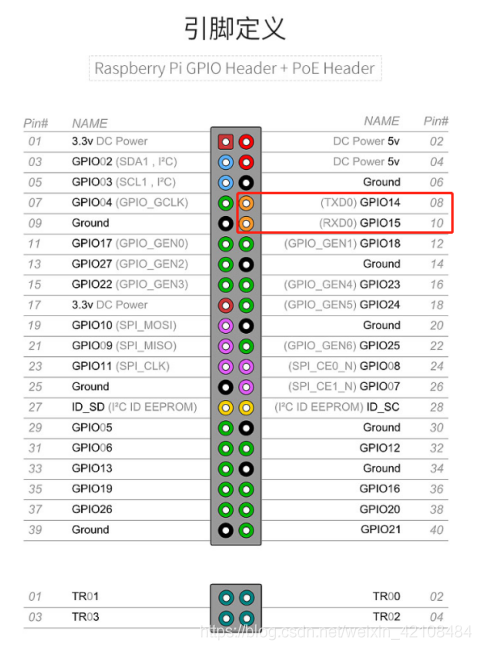
外设IO口定义说明
从树莓派的相关资料我们可以看到,树莓派有两个串口可以使用,一个是硬件串口(/dev/ttyAMA0),另一个是mini串口(/dev/ttyS0)。硬件串口有单独的波特率时钟源,性能好,稳定性强;mini串口功能简单,稳定性较差,波特率由CPU内核时钟提供,受内核时钟影响。
树莓派(3/4代)板载蓝牙模块,默认的硬件串口是分配给蓝牙模块使用的,而性能较差的mini串口是分配给GPIO串口 TXD0、RXD0。
Serial 配置
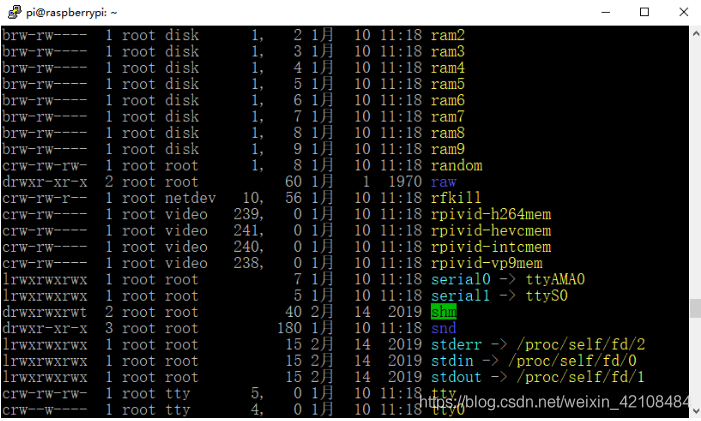
首先运行ls /dev -al命令查看到默认的串口分配方式,如下图所示:
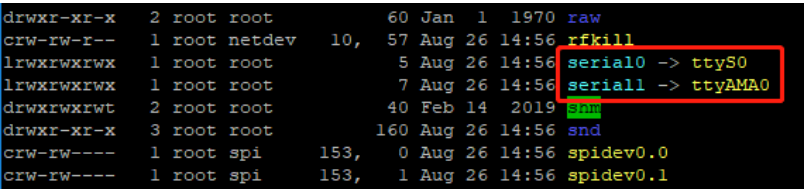
由于硬件串口分配给板载蓝牙使用,所以要释放掉,并设置硬件串口分配给GPIO串口。 首先登陆终端后,输入sudo raspi-config命令进入树莓派系统配置界面,选择第五个Interfacing Options:
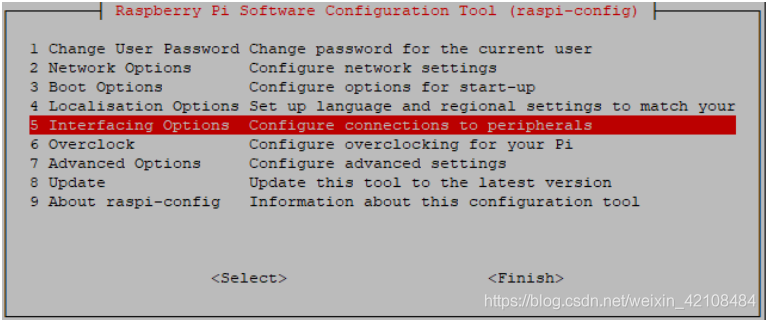
进入P6 Serial
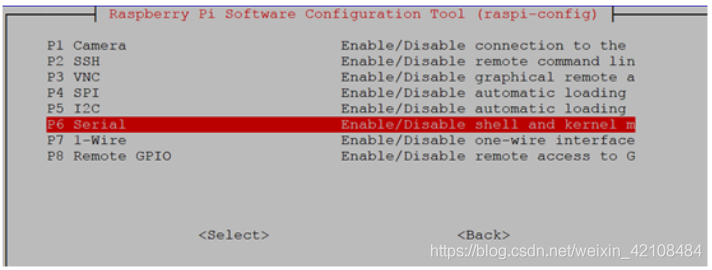
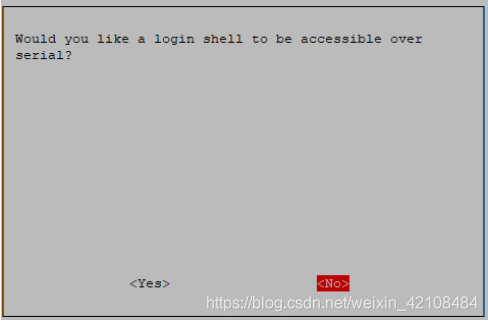
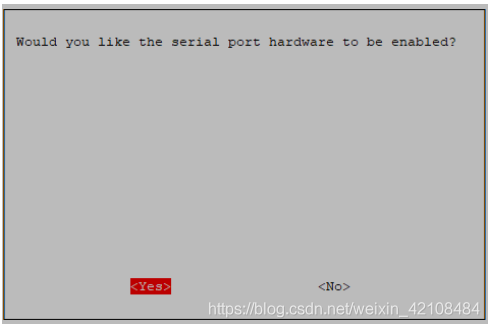
选择关闭串口登录功能,打开硬件串口调试功能:
完成后提示以下界面,按 OK
设置硬件串口为GPIO串口
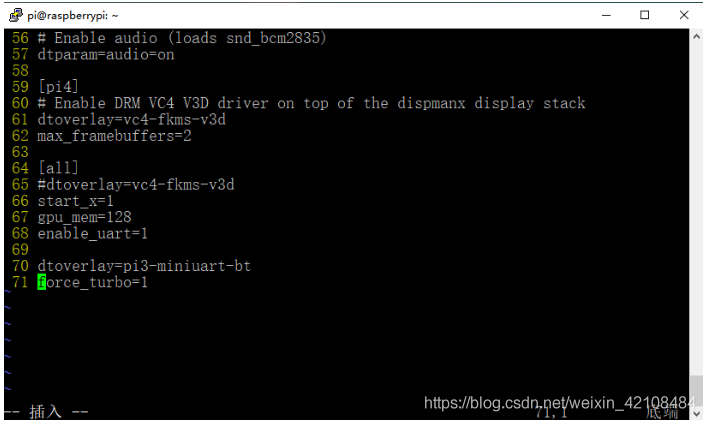
接着将串口配置为我们的GPIO串口,sudo vim /boot/config.txt,将下面两行内容添加到最后:
dtoverlay=pi3-miniuart-bt
force_turbo=1
enable_uart=1 #raspi3 需要这一项,4 应该不用
修改后保存并退出,内容如下图片所示:
请注意:树莓派4b也是写pi3。交换映射完成。重启树莓派后,再次输入 ls /dev-al,可以看到两个串口已经互相换了位置:
minicom串口助手测试
$ sudo apt-get install minicom # 安装 minicom
$ minicom -D /dev/ttyAMA0 -b 9600
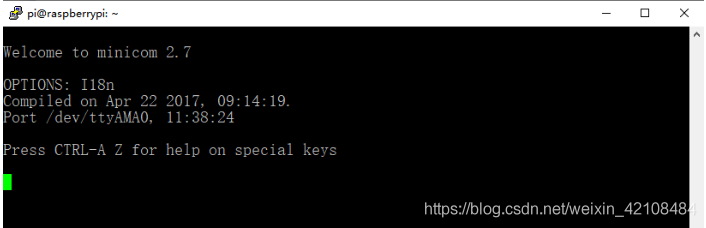
其中-D表示选择串口/dev/ttyAMA0,-b 设置波特率为9600,此参数可以不用设置,默认11520,并且退出minicom时需要先按Ctrl+A,再按Z,弹出以下菜单,0。
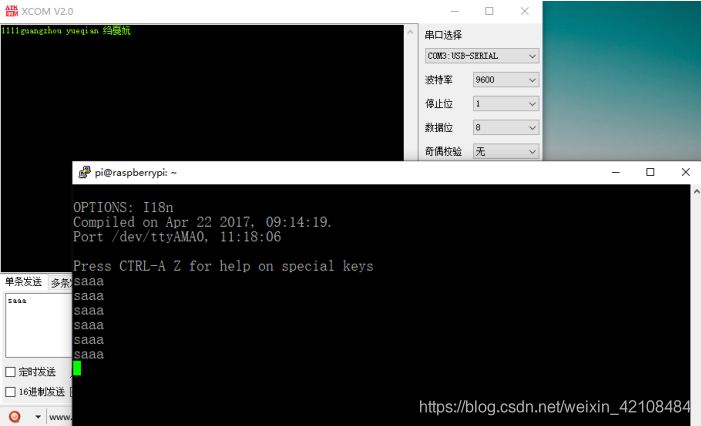
将树莓派与TTL对应接上,就可以通过PC串口助手与树莓派互相发送、接收数据,但是树莓派在发送数据时,命令终端并不会显示,如下图所示:
例程
cpp
#include <errno.h>
#include <string.h>
#include <wiringPi.h>
#include <wiringSerial.h>
#include <cstdio>
#include <cstdlib>
char UartBuff[100];
int main(void)
{
int fd;
if ((fd = serialOpen("/dev/ttyAMA0", 115200)) < 0)
{
fprintf(stderr, "Unable to open serial device: %s\n", strerror(errno));
return 1 ;
}
serialPuts(fd, "uart send test, just by launcher\n");
while(1)
{
UartBuff[0] = serialGetchar(fd);
if (UartBuff[0] > 0)
{
putchar(UartBuff[0]);
serialPutchar(fd,UartBuff[0]);
}
}
return 0;
}
使用 USB 转 TTL 串口模块,USB 端接电脑,TTL 端接树莓派的 IO 口,实物连接图如下:

运行在树莓派上编写完成的串口接收和发送程序,我们在 Windows 电脑端的串口调试助手接收到如下数据:
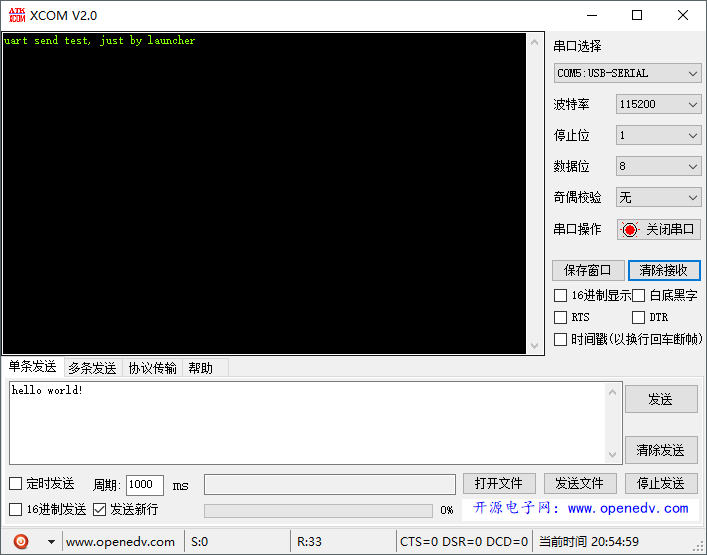
接着,从串口助手发送“hello world!”给树莓派,树莓派接收到如下数据,并打印出来:

串口助手也同时接收到如下信息:

至此,证明树莓派串口设置成功。
python
import serial
import time
ser = serial.Serial("/dev/ttyAMA0", 115200)
def main():
while True:
recv = get_recv()
if recv != None:
print recv
ser.write(recv[0] + "\n")
time.sleep(0.1)
def get_recv():
cout = ser.inWaiting()
if cout != 0:
line = ser.read(cout)
recv = str.split(line)
ser.reset_input_buffer()
return recv
if __name__ == "__main__":
try:
main()
except KeyboardInterrupt:
if ser != None:
ser.close()